The GEODESY proposal aims to answer to the call proposal identified with the code GSA/GRANT/07/2019 published by the European GNSS Agency (GSA) for the Development of a drone-borne double frequency Galileo receiver.
The GEODESY Project (Galileo Enhanced Operation for Drone Systems) aims to develop a navigation solution for drones, based on a Galileo multi-constellation/multi-frequency receiver, which could support drones achieving robust navigation performances enabling them to achieve stringent technical and operational requirements.
The solution will consist not only in developing the navigation solution but to validate it and demonstrating its benefits in a representative environment, targeting drone operations under a specific category.
 As an initial step, it will be described the CONOPs for a specific category of UAV, that describes the operational environment of unmanned aircraft thereby ensuring a common understanding of the challenges and the operational scenarios to validate the GEODESY navigation algorithms. The concept should define specific category operations, provide common points, particularities of UAV types, unique attributes, and challenges, among other considerations.
As an initial step, it will be described the CONOPs for a specific category of UAV, that describes the operational environment of unmanned aircraft thereby ensuring a common understanding of the challenges and the operational scenarios to validate the GEODESY navigation algorithms. The concept should define specific category operations, provide common points, particularities of UAV types, unique attributes, and challenges, among other considerations.
The project will be also focused on the added value that the use of Galileo and its differentiators could give to drones’ performance, outstanding the features of integrity, authentication and reliability given by OS-NMA and EGNOS corrections.
Therefore, this proposal aim is not only to propose a navigation system for UAVs but to validate it for different unmanned aerial platforms types and consolidate the use of Galileo in the specific category operation for drones.
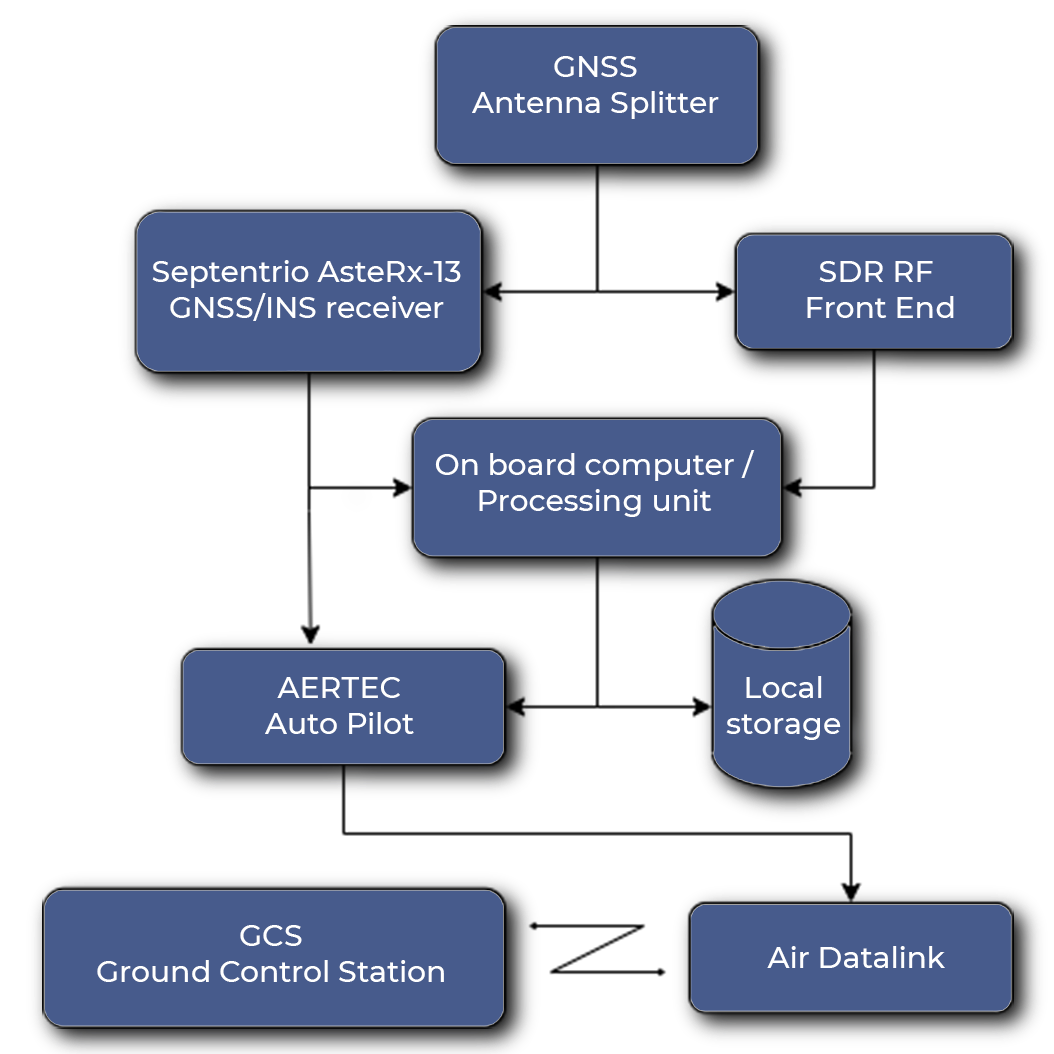
An open source GNSS Software Defined Receiver (SDR), provided by CTTC, for implementing novel navigation and integrity algorithms.
The proposed solution is based on two main elements: • A pre-commercial GNSS/INS receiver: Septentrio AsteRx-i3